
I develop algorithms to help autonomous robots operate in extreme environments like the Moon, microgravity, and underwater.
I joined USC in fall 2025, and was previously with NASA’s Jet Propulsion Lab.
I’m broadly interested in autonomy for mobile robotic systems operating when conditions are uncertain, unknown, or unstructured. My work integrates tools from optimal control, reinforcement learning and motion planning, and, increasingly, their interplay with perception. This theme blends real-world assumptions and constraints with environment-aware algorithm design to let robots work where they currently can’t.
Prospective students: Please see here.
Selected Publications
You can also find my latest work on Google Scholar.
2025

2024
Lunar Leader: Persistent, Optimal Leader Election for Multi-Agent Exploration Teams
Keenan Albee, et al.
MASSPACE @ AAMAS, 2024
link

2022
2021
Projects and Platforms
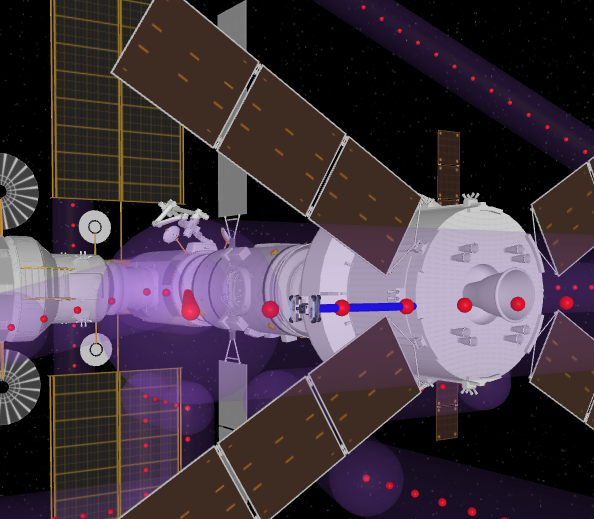
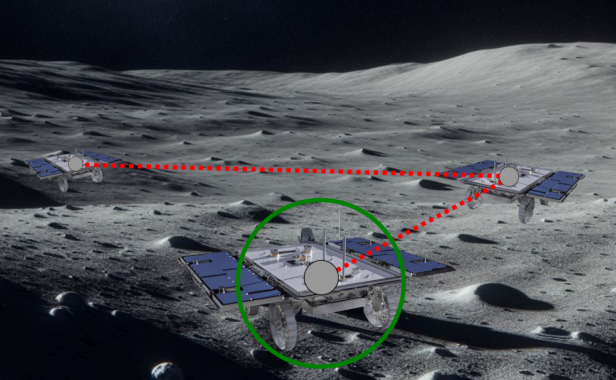
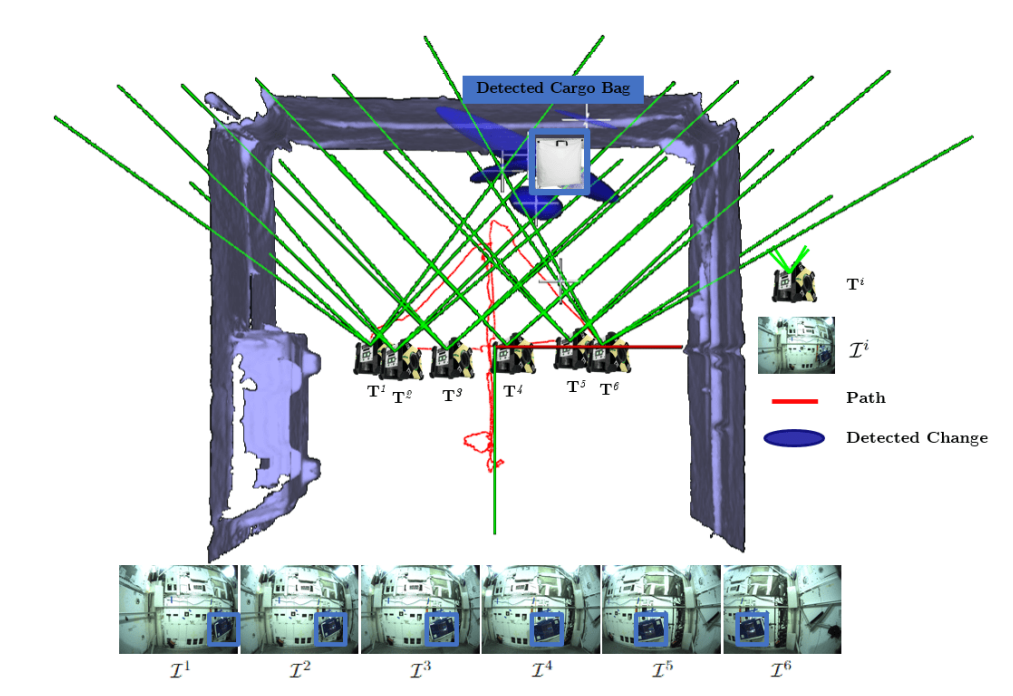
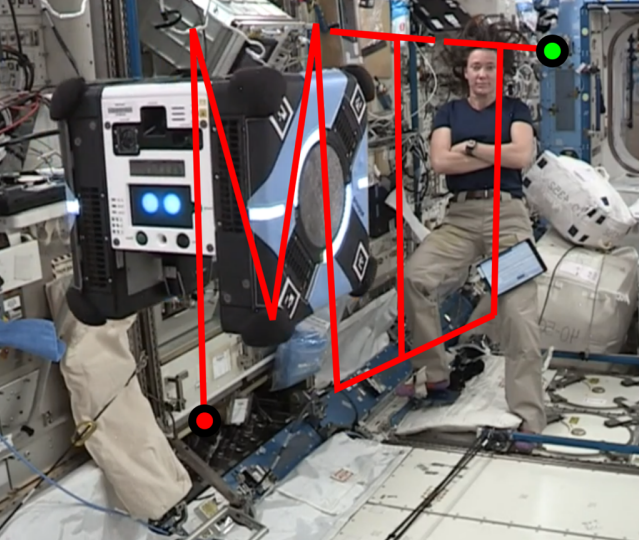
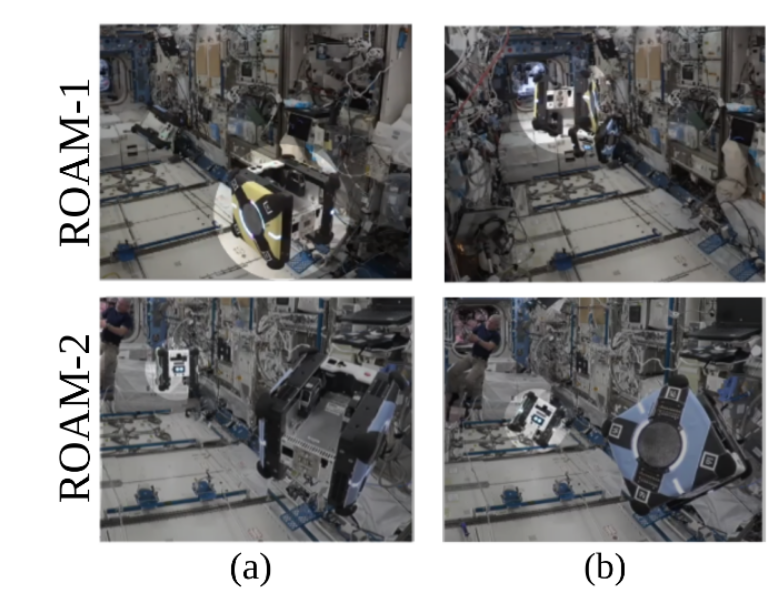
I like to get robots into the field to uncover new algorithmic insights and verify performance in complex situations that often break initial algorithmic assumptions. My algorithms have flown on-orbit multiple times and I am responsible for multiple autonomy “firsts” that will fly to the moon on NASA’s CADRE lunar rovers in the near future on the Intuitive Machines-3 lander1. My work includes the first autonomous on-orbit rendezvous with an uncharacterized tumbling target; the (soon-to-be!) first model predictive controller to run on another celestial body; and the (soon-to-be!) first distributed algorithm in a multi-agent space exploration mission. I was a contributing developer to NASA’s Astrobee platform2, and was the last researcher to work with MIT’s SPHERES platform. My favorite applications are in the space domain, including planetary surface robotics, microgravity robotics, and other canonical problem areas like powered descent guidance. I also work on broadly applicable platforms, including medical robotic devices, maritime robotics, and ground vehicle robotics.
Education
- Ph.D. in Aeronautics and Astronautics (Autonomous Systems), Massachusetts Institute of Technology, 2022
- S.M. in Aeronautics and Astronautics, Massachusetts Institute of Technology, 2019
- B.S. in Mechanical Engineering, Columbia University, 2017
I received a Ph.D. in aeronautics and astronautics (autonomous systems) from MIT in 2022 under a NASA Space Technology Research Fellowship. Before that, I received my B.S. in mechanical engineering (minors in computer science and history) at Columbia Univeristy in 2017. You can find my full CV here.
Research Interests
Robotic motion planning; safe motion planning under uncertainty; model predictive control, optimal control, and trajectory optimization; reinforcement learning; information-theoretic planning; space systems.
Everything Else
I’m an avid backpacker, skier, and gravel biker/bikepacker. I also scuba dive and am a private pilot, and am always working on finding more time for all of the above alongside research. Interestingly enough, many of my hobbies revolve around making real-time planning decisions for dynamical systems in uncertain environments, so they might be considered field work :).
-
Acknowledgment to my many collaborators here including but not limited to: Abhishek Cauligi, Brian Coltin, Monica Ekal, Federico Rossi, Sriramya Bhamidipati, Caroline Specht, Roberto Lampariello, and others. ↩
-
Here is my flight software guide for autonomy researchers using Astrobee, a fantastic research platform developed by NASA Ames’ Intelligent Robotics Group. ↩
The Laboratory for Autonomous Systems in Exploration and Robotics (LASER) pursues exciting research in extreme environment robotic autonomy.
You can find more information about the lab at our website here.